Навигационный ассистент для города
Навигационный ассистент (City NOA) — это функция помощи водителю, предназначенная для снижения нагрузки при управлении автомобилем в городских условиях. Помощь при вождении в городской навигации может переключать полосы движения в соответствии с навигационным маршрутом на карте автомобиля, автономно обгонять медленные автомобили, регулировать скорость круиз-контроля, реагировать на светофоры для проезда перекрестков и останавливаться у конечной точки навигации.
Условно-автономное вождение по городу – функция ассистента вождения, не позволяющая учесть все возможные условия движения, погодные условия и обстановку на дороге. Водителю необходимо постоянно следить за автомобилями вокруг, соблюдением безопасной дистанции, скоростного режима, своевременностью торможения, удерживая руки на рулевом колесе и сохраняя готовность взять управление на себя в любой момент.
- Функция условно-автономного вождения по городу отображает на центральном информационном дисплее время перестроения, проезда через перекрестки, а также может автоматически включать и выключать соответствующие сигналы поворота.
- Функция условно-автономного вождения по городу не распознает знаки регулировщиков. Во избежание нарушений правил дорожного движения водитель должен самостоятельно распознавать их.
Визуально-языковая модель (VLM)
При развертывании интерфейса системы восприятия окружающей среды в режим карточки 2x или на весь экран во время работы интеллектуального вождения система отображает информацию о решениях интеллектуальной модели VLM и сопровождает ее голосовыми оповещениями. Это позволяет водителю понимать логику движения автомобиля и при необходимости вовремя взять управление на себя.
Отображаемая информация включает следующее:

| №п/п | Содержание |
|---|---|
| 1 | Реальные фотоснимки |
| 2 | Текущая и возможные полосы движения |
| 3 | Тип дороги и время |
| 4 | Погодные условия и время действия ограничений для автобусной полосы |
Визуальная языковая модель способна обрабатывать изображения и естественный язык, обеспечивая в нормальной ситуации точное распознавание окружающей обстановки. Однако вероятность неверного распознавания сохраняется. Водитель должен внимательно следить за транспортной обстановкой, сохранять безопасную дистанцию, контролировать скорость движения, вовремя тормозить и в целом сохранять контроль над автомобилем и готовность взять управление на себя в любой момент.
Настройки
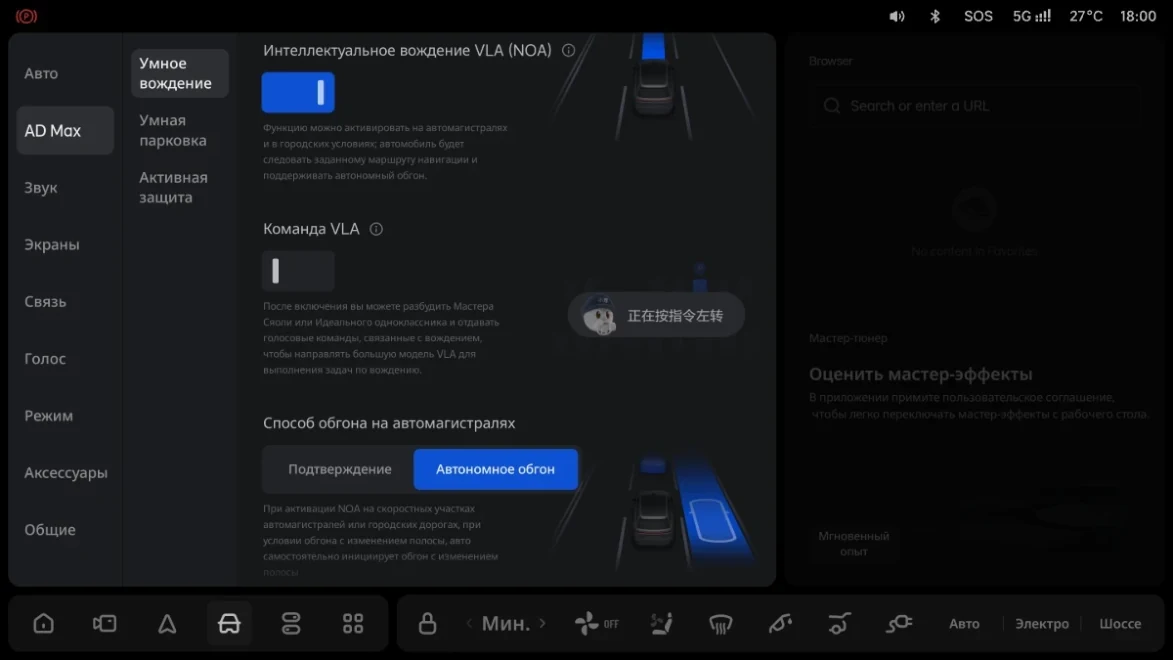
Функции помощи в навигации по городу и по магистралям можно включать и выключать одновременно на центральном экране управления: Настройки > AD Max > Интеллектуальное вождение > ИИ-ассистент VLA (NOA).
После активации ИИ-ассистента VLA водитель может отдавать голосовые команды поворота, перестроения, остановки и начала движения.
- Перед использованием данной функции в первый раз изучите видео о голосовых командах функции условно-автономного вождения и пройдите соответствующий тест. При передаче автомобиля третьим лицам выйдите из своей учетной записи и попросите этих лиц просмотреть видео и пройти тест по использованию данной функции.
- При активации условно-автономного вождения по городу на городской дороге, система принимает решение о смене полосы после всесторонней оценки окружающей обстановки (значение ограничения скорости на текущем участке, уровень помехи со стороны автомобиля впереди и т.п.) и выполняет смену полосы.
- При использовании функции голосовых команд следите за тем, чтобы Lixiang Tongxue (голосовой помощник) подтверждал прием команды. В случае отсутствия подтверждения от системы «Lixiang Tongxue», выполните вождение самостоятельно.
Активация функции
Для активации функции навигационного ассистента должны быть одновременно выполнены все следующие условия:
- Назначен маршрут до пункта назначения с помощью штатной навигационной системы.
- Автомобиль находится на передаче «D», а текущая скорость составляет от 0 до 80 км / ч.
- Лидар, миллиметровый радар, камеры и другие связанные компоненты функционируют нормально, без помех.
- Дорожное покрытие в хорошем состоянии, качество сетевого соединения соответствует требованиям.
- Педаль тормоза не нажата.
- Указатели поворота выключены.
- Отсутствуют риски для безопасности:
- Водитель и все пассажиры пристегнуты ремнями безопасности.
- Все двери закрыты.
- Давление в шинах в норме.
- Функции антиблокировочной системы (ABS), автоматического экстренного торможения (AEB) и другие не активированы.
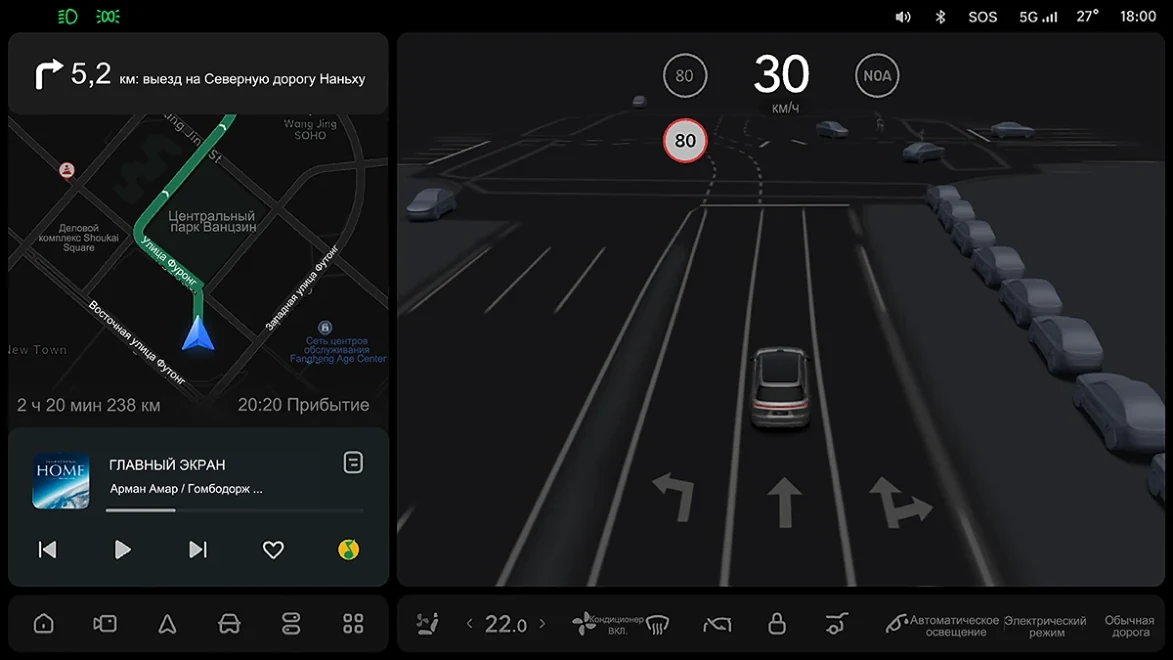
Когда автомобиль въезжает на поддерживаемый участок дороги, на интерфейсе отображения информации об окружающей обстановке (EID) на центральном дисплее появится соответствующее уведомление.
Чтобы активировать функцию навигационного ассистента, дважды подряд переместите правый подрулевой рычаг вниз.
Если во время движения снова активировать ассистента вождения, нажав кнопку «Переключить в режим удержания в центре полосы» на центральном информационном дисплее, автомобиль переключится в режиме удержания в центре полосы (LCC). Для активации функции голосового помощника интеллектуального вождения (NOA) нажмите «Переключиться на условно-автономное вождение» на центральном информационном дисплее.

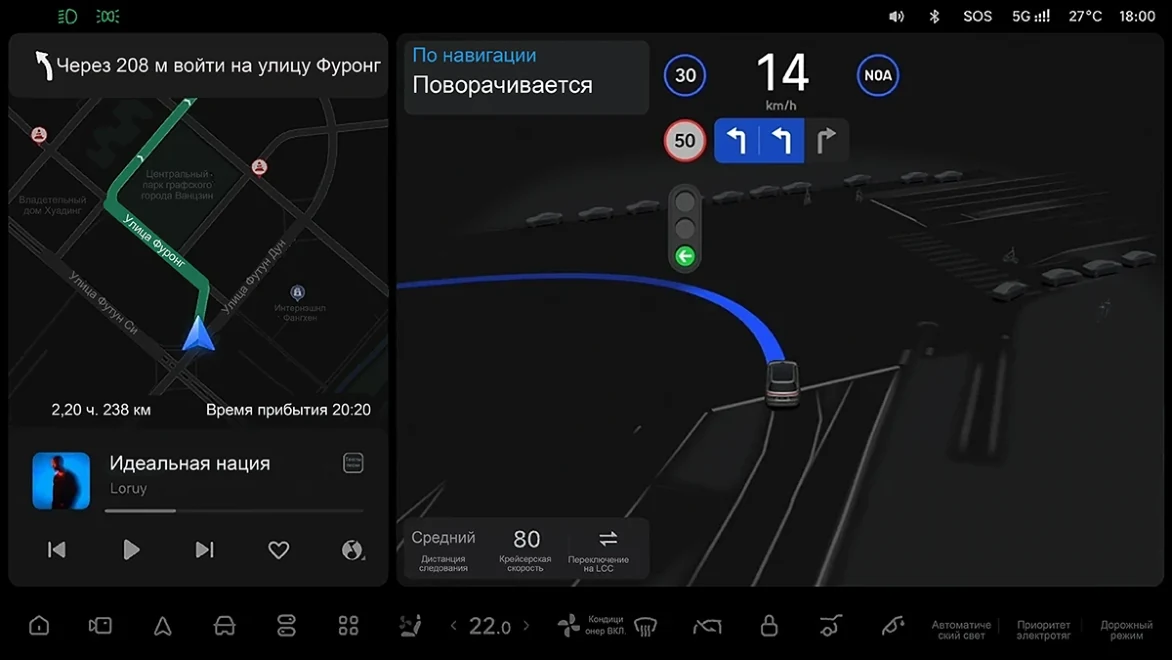
После активации функции навигационного ассистента значок «NOA» станет синим, появится синяя линия (указатель полосы), а соответствующая информация отобразится на центральном экране управления.
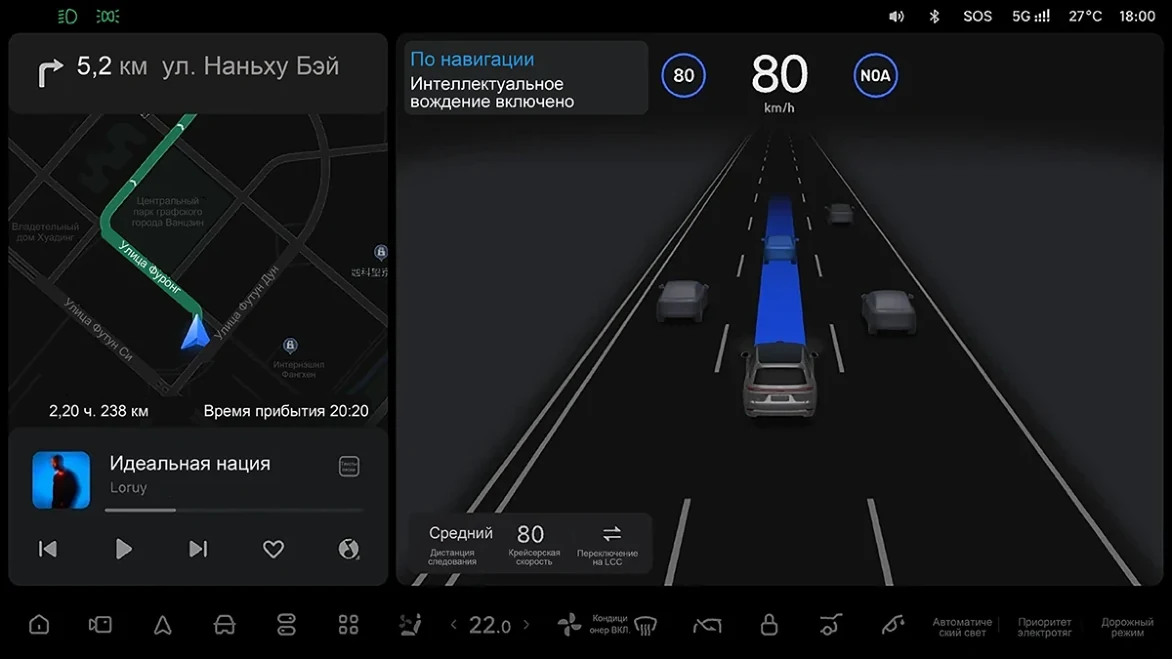
Регулировка крейсерской скорости
При работе функции навигационного ассистента система в реальном времени регулирует крейсерскую скорость, учитывая информацию об ограничении скорости на дороге, предоставляемую навигационной картой, и установленное водителем смещение от предельной скорости. Для ручной регулировки крейсерской скорости используйте колесико прокрутки на правой стороне рулевого колеса. После ручной регулировки водителем навигационный ассистент не будет автоматически корректировать крейсерскую скорость до тех пор, пока в навигационной системе не изменится информация об ограничении скорости на следующем участке дороги.
- Сведения о допустимой скорости на автомобильной навигационной карте не являются актуальными в реальном времени. Они могут не соответствовать фактической дороге. Всегда учитывайте фактическое значение ограничения скорости. При необходимости измените скорость автономного круиз-контроля или возьмите управление на себя.
- При работе функции городского автопилота (City NOA) верхний предел скорости адаптивного круиз-контроля устанавливается на 80 км / ч, а нижний предел — на 5 км / ч.
- При движении согласно ограничению скорости в городе с использованием функции условно-автономного вождения по городу значение верхнего ограничения скорости увеличивается на 20 км / ч и не превышает 80 км / ч.
- Водитель также может дать голосовую команду запомнить скорость движения автомобиля. После запоминания значения скорости через команду VLA транспортное средство будет автоматически применять это значение скорости VLA при каждом проезде данного участка дороги. Водитель может нажать педаль акселератора для активного увеличения текущей скорости:
- Если педаль акселератора нажата в течение менее 15 секунд и скорость автомобиля не превышает 130 км / ч, автомобиль ускорится. После отпускания педали акселератора автомобиль замедлится и в конечном итоге продолжит движение с установленной крейсерской скоростью.
- Если педаль акселератора нажата дольше 30 секунд или текущая скорость превышает 130 км / ч, функция навигационного ассистента отключается, и система запрашивает, чтобы водитель немедленно взял на себя управление.
Остановиться у обочины
В конечной точке маршрута система определяет, соответствует ли окружающая обстановка требованиям для парковки. Если проверка пройдена успешно, система помогает водителю остановиться у обочины и припарковаться.
- В случае вывода автомобилем системных предупреждений на приборную панель, голосовых сообщений или иных сигналов, сохраняйте контроль над автомобилем и примите необходимые меры.
- При обнаружении признаков опасности срочно возьмите управление на себя. Никогда не проверяйте пределы надежности системы.
- Когда функция помощи при вождении в городских условиях отключается, автомобиль может находиться в состоянии без функциональности помощи при вождении. Пожалуйста, внимательно следите за дорожной обстановкой и сохраняйте контроль над автомобилем в любое время, своевременно вмешиваясь при необходимости. Водитель может взять управление на себя следующими способами:
- Нажата педаль тормоза.
- Повернуть рулевое колесо.
- Перевести рычаг передач вверх.
Когда функция городского навигационного ассистента отключается, направляющая линия на центральном экране управления исчезает и появляется текстовое сообщение об отключении функции, а система издает звуковой сигнал.
- При обнаружении признаков опасности срочно возьмите управление на себя. Никогда не проверяйте пределы надежности системы.
- Когда функция помощи при вождении в городских условиях отключается, автомобиль может находиться в состоянии без функциональности помощи при вождении. Пожалуйста, внимательно следите за дорожной обстановкой и сохраняйте контроль над автомобилем в любое время, своевременно вмешиваясь при необходимости.
- Когда пользователь нажимает [ Переключиться на LCC] на экране центральной консоли и в течение одного цикла вождения дважды подряд переключает правый рычаг на рулевом колесе вниз, приоритетно активируется функция помощи при вождении для всех сценариев. После активации этой функции она только управляет автомобилем для удержания в центре полосы движения, не следуя навигационному маршруту, предоставленному встроенной картой. Если использование навигационного ассистента невозможно продолжить из-за сбоя в работе, на центральном экране управления появляется сообщение «Пожалуйста, немедленно возьмите управление автомобилем на себя» со звуковым сигналом. Убедитесь, что вы сохраняете контроль над автомобилем и своевременно вмешиваетесь. Если предупреждающее сообщение исчезнет, попробуйте активировать функцию снова. Если сообщение тревоги отображается в течение длительного времени, вы можете припарковать автомобиль в безопасной зоне и связаться с Сервисным центром Ли Авто / Li Auto. Ситуации, в которых функция навигационного ассистента может отключиться или не активироваться:
- Нажата педаль тормоза.
- автомобиль не на передаче «D»;
- Открыты дверь салона, дверь багажника или капот.
- Пассажиры в автомобиле не пристегнуты ремнями безопасности.
- Автомобиль движется по дороге с крутыми поворотами.
- Долгое время отсутствует мобильная сеть или сигнал позиционирования слабый.
- Возник системный сбой.
Помощь в перестроении
При работе функции навигационного ассистента система принимает решение о перестроении и выполняет его, комплексно анализируя текущие дорожные условия, включая информацию об ограничении скорости, ситуацию с впереди идущим транспортом и другую обстановку.
Автоматическое перестроение: Когда система определяет, что текущая дорожная обстановка требует перестроения, она автоматически включает указатель поворота и выполняет маневр перестроения.
Ручное перестроение: Во время движения водитель может вручную включить указатели поворота для активной смены полосы движения. Если система определяет, что условия соседней полосы на соответствующей стороне соответствуют требованиям для смены полосы, система применяет крутящий момент рулевого управления для помощи водителю в смене полосы движения.
Для включения указателей поворота вручную переместите под рулевой переключатель в крайнее верхнее или крайнее нижнее положение. Ожидание смены полосы движения: Во время перестроения, если система обнаруживает, что ширина целевой полосы недостаточна, на целевой полосе находятся другие транспортные средства или разметка между текущей и целевой
полосами сплошная, функция помощи при перестроении переходит в режим ожидания, а на центральном дисплее появляется соответствующая информация.

Отмена перестроения: Если состояние ожидания перестроения превышает приблизительно 30 секунд, система отменяет маневр и продолжает движение по текущей полосе.
Процесс перестроения: Когда соседняя полоса движения соответствует условиям для смены полосы движения, система будет управлять автомобилем для смены полосы движения. В процессе перестроения на центральном информационном дисплее отображается информация о перестроении, а на целевой полосе отображается рамка положения автомобиля.

В сложной дорожной обстановке система может оказаться неспособна выполнить перестроение. Водителю необходимо постоянно следить за обстановкой на нужной полосе, сохранять контроль над автомобилем и при необходимости самостоятельно перестроиться в нужную полосу в удобный момент. В процессе перестроения при сложной дорожной обстановке функции навигационного ассистента могут быть ограничены или не способны отреагировать в следующих случаях:
- Быстрое приближение транспортных средств сбоку.
- Внезапное перестроение другого автомобиля на близкой дистанции.
- Перестроение других транспортных средств в условиях плотного потока на низкой скорости.
- Быстрое приближение транспортных средств сзади.
- Объезд неподвижного препятствия при быстром приближении встречного автомобиля.
- Выезд на загруженную главную дорогу.
- Наличие ограждений и противоударных тумб на съездах или развилках.
- Слияние двух соседних полос.
- Одновременное перестроение двух автомобилей на одну полосу, или одновременное перестроение двух автомобилей, движущихся друг за другом, в одном направлении.
- Внезапное ускорение движущегося сзади автомобиля для обгона во время перестроения, поворота или въезда на съезд.
- Частичное или полное перекрытие полосы и соседних полос строительной техникой, конструкциями для дорожных испытаний или припаркованными автомобилями.
- Движение другого автомобиля по разметке целевой полосы.
- Наличие плохо распознаваемых препятствий на целевой полосе: дорожных конусов, водных барьеров, строительных ограждений, низких бордюров и т.д.
Реагирование на сигналы светофора
При работе функции навигационного ассистента система, используя данные навигационной карты и информацию от системы восприятия окружающей обстановки, распознает полосу движения автомобиля и назначение сигналов светофора для этой полосы, самостоятельно реагируя на них остановкой или проездом перекрестка.
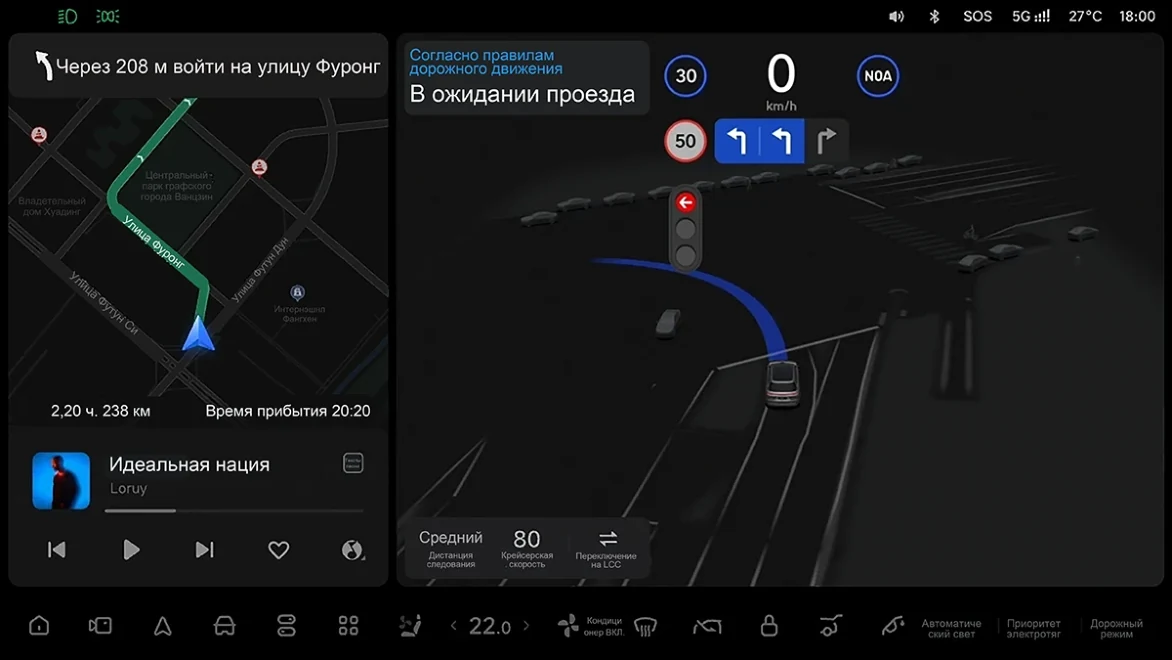
Когда система не может подтвердить состояние светофоров, она предоставит подсказки через центральный информационный дисплей и голосовые оповещения, напоминая водителю проверить состояние светофора. Водитель нажимает рычаг «OK» на правой стороне рулевого колеса вверх, чтобы подтвердить, что транспортное средство проедет перекресток. В случае неподтверждения система будет управлять транспортным средством для остановки у стоп-линии.
- Для подтверждения соответствия статуса светофора фактическим обстоятельствам, нажмите «OK». После подтверждения система проведет транспортное средство через перекресток, игнорируя сигналы светофора.
- Функция распознавания сигналов светофора может работать неточно; постоянно следите за дорогой и системой и будьте готовы при необходимости взять управление на себя.
- Система может не распознать временные светофоры, светофоры, расположенные посередине дороги, или нестандартные светофоры.
- При наличии нескольких светофоров система может неправильно распознавать их сигналы.
- Функция условно-автономного вождения по городу не распознает знаки регулировщиков. Во избежание нарушений правил дорожного движения водитель должен самостоятельно распознавать их.
- Функция условно-автономного вождения по городу не распознает динамически отображаемые текстовые сообщения на электронных табло. Во избежание нарушения правил дорожного движения всегда следите за обстановкой на дороге.
- Небольшое расстояние между светофорами, их загораживание и высокое расположение могут повлиять на способность системы распознавать дорожные сигналы. Всегда следите за дорогой и системой, сохраняя контроль над автомобилем и готовность в любой момент взять управление на себя.
Проезд перекрестков
В соответствии с текущей дорожной обстановкой система автоматически управляет автомобилем для выполнения левых и правых поворотов, а также для въезда на второстепенную дорогу и выезда с нее.
- В настоящее время система поддерживает развороты и развороты в три приема, требующие движения задним ходом. В сложных транспортных условиях или при движении по узкой полосе система может не справиться с выполнением плавного разворота. Всегда следите за дорогой и системой, сохраняя контроль над автомобилем и готовность в любой момент взять управление на себя.
- В сложных транспортных условиях система может не обеспечить въезд на нужную полосу. Водителю необходимо постоянно следить за обстановкой на нужной полосе, сохранять контроль над автомобилем и при необходимости быстро брать управление на себя.
- В некоторых особых обстоятельствах данная функция ассистента вождения может не обеспечить выезд на въезд на рампу или съезд с нее. Будьте внимательны при езде, держитесь за рулевое колесо в течение всего пути и будьте осторожны.
Функция помощи при замедлении при перехвате управления
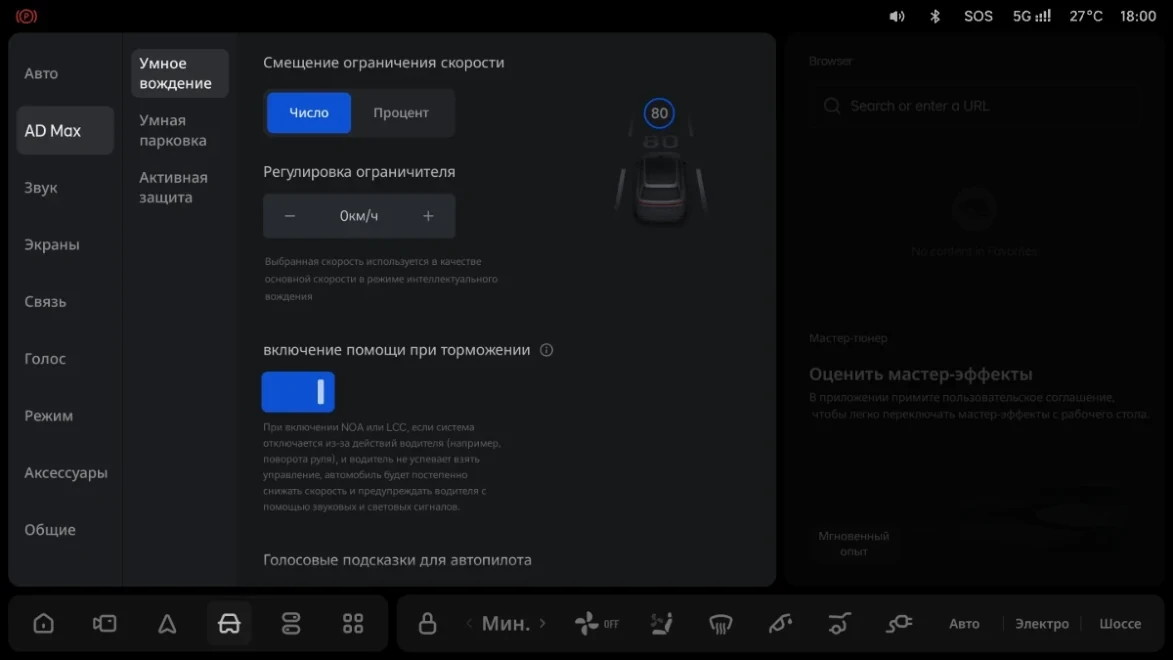
Функцию замедления при передаче управления можно включать и выключать на центральном экране управления: Настройки > AD Max > Интеллектуальное вождение > Замедление при передаче управления. Переключатель помощи при замедлении при перехвате управления по умолчанию установлен во включенное состояние.
При работе функции навигационного ассистента, если функция замедления включена и операция водителя приводит к отключению системы (например, поворот рулевого колеса водителем) и водитель не берет управление на себя, автомобиль начинает плавно замедляться и предупреждает водителя с помощью звуковых и световых сигналов.
При работе функции навигационного ассистента, если функция замедления выключена и операция водителя приводит к отключению системы (например, поворот рулевого колеса водителем), система предупреждает водителя с помощью звуковых и световых сигналов и управление полностью переходит к водителю.
Предупреждение о контроле внимания водителя
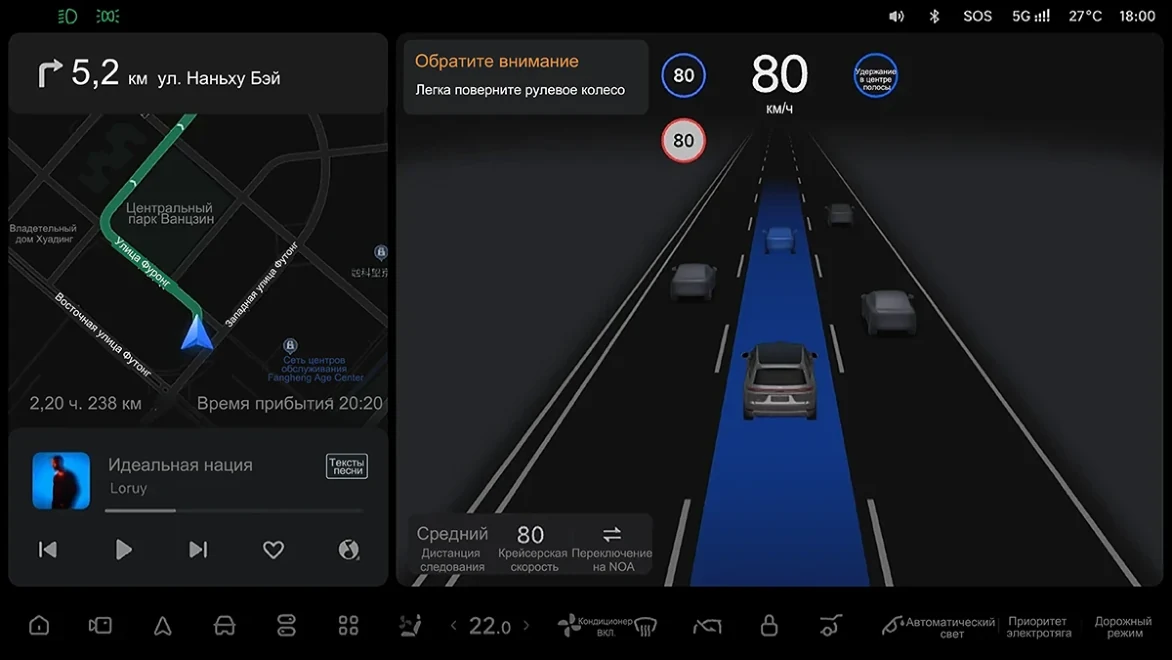
После включения функции навигационного ассистента водитель должен сохранять концентрацию внимания. Если водитель снимет руки с рулевого колеса или отвлечется, может сработать предупреждение.
Если водитель на короткое время убирает руки с рулевого колеса, на центральном информационном дисплее отображается информация 【 Пожалуйста, слегка поверните рулевое колесо 】. Более подробная информация приводится в разделе «Система мониторинга внимания водителя».
Если водитель не держит рулевое колесо обеими руками, на центральном информационном дисплее отобразится информация «Пожалуйста, немедленно возьмите управление автомобилем на себя», сопровождаемая предупреждающим звуковым сигналом.
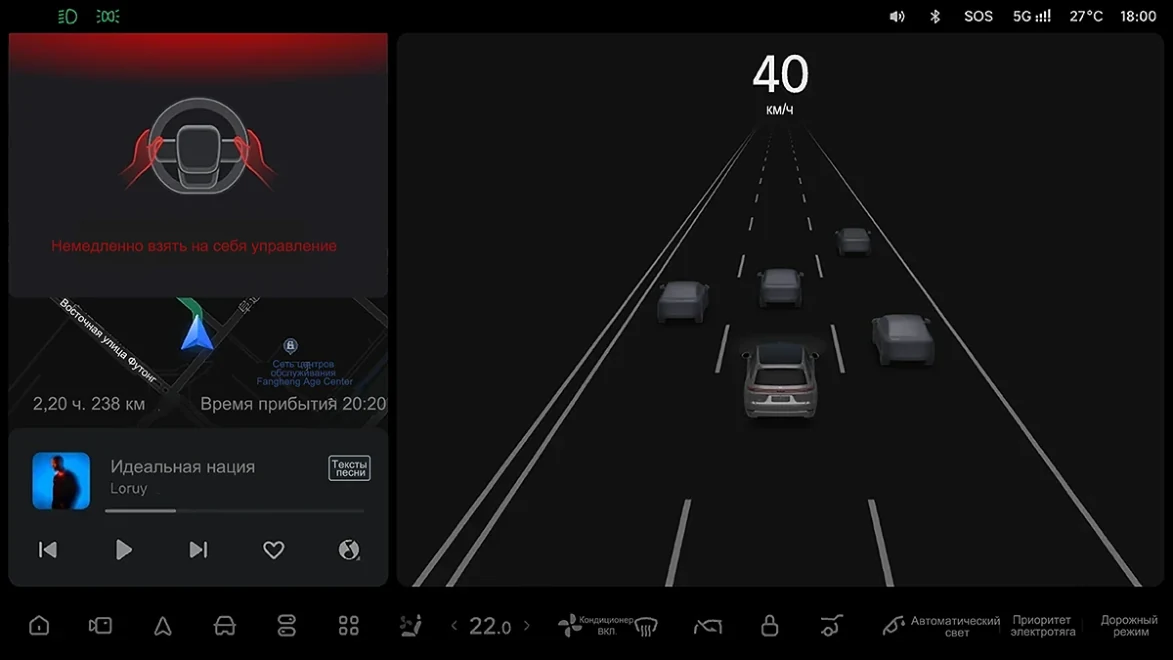
Если водитель долго не держит рулевое колесо, система включит аварийную сигнализацию и плавно замедлит автомобиль до полной остановки на текущей полосе. После остановки автомобиля на 3 секунды система автоматически совершит звонок в службу поддержки Ли Авто / Li Auto и постарается разбудить водителя. Повторная активация функции удержания в полосе станет возможной только после переключения на передачу P.
ИИ-ассистент VLA
После активации ИИ-ассистента VLA водитель может активировать ИИ-ассистента Lixiang Tongxue и отдавать голосовые команды для управления вождением.
- Голосовые команды – функция ассистента вождения. Перед подачей любых команд убедитесь в безопасности движения. Водителю необходимо постоянно следить за автомобилями вокруг, соблюдением безопасной дистанции, скоростного режима, своевременностью торможения, удерживая руки на рулевом колесе и сохраняя готовность взять управление на себя в любой момент.
- При использовании функции голосовых команд каждый раз убедитесь в том, что Lixiang Tongxue (голосовой помощник) распознал и принял команду. В случае отсутствия подтверждения от системы «Lixiang Tongxue», выполните вождение самостоятельно. ИИ-ассистент VLA можно использовать для выполнения следующих команд: Основные инструкции по управлению:
- Повернуть налево / направо
- Перестроиться налево / направо
- Припарковаться
- Начать движение
- Сдать назад
- Развернуться
- Продолжить движение
- Обогнать ХХ автомобилей Команды для контроля скорости и дистанции:
- Увеличить скорость
- Снизить скорость
- Установить скорость ХХ км / ч
- Увеличить дистанцию
- Уменьшить дистанцию Команда запоминания скорости:
- На этом участке ехать со скоростью ХХ км / ч Команда выбора полосы:
- Занять среднюю полосу Команды парковки:
- Остановиться у обочины
- Проехать вперед ХХ метров
- Припарковаться рядом с подъемником Команды следования к назначенному месту:
- Направить автомобиль к B2
- Остановиться в Зоне А
- Выехать из подземного паркинга Команды удаленной парковки в пределах парковочной зоны:
- Мне нужно выйти здесь
- Я выхожу первым
Функциональные ограничения
Городской LCC не может справиться со всеми дорожными условиями, дорожными ситуациями и погодными условиями. Не используйте и не включайте функцию городского LCC в следующих сценариях:
- Строительные работы, объезд или дорожные работы.
- Разметка полос на участке движения нечеткая или часто и сложно меняется, например на участках совместного движения с трамваями, в зонах ответвлений и слияний потоков.
- Плохое состояние дорожного покрытия: выбоины, неровности, снег, лед, влажное и скользкое покрытие.
- Крутые повороты и изгибы.
- Неблагоприятные погодные условия: дождь, снег или туман.
В следующих ситуациях возможности функции могут быть ограничены или она может не успевать полностью реагировать. Обратите внимание на безопасность вождения, сохраняйте бдительность, постоянно удерживайте руки на рулевом колесе и будьте готовы в любой момент взять управление на себя:
- Возникновение особых или сложных дорожных условий.
- Движение по загруженным дорогам с интенсивным потоком автомобилей и пешеходов.
- Проезд участков, где возможно внезапное появление пешеходов или велосипедистов.
- Съезды или выезды, где припаркованы или закрывают обзор крупногабаритные транспортные средства.
- Внезапное перестроение другого автомобиля на близкой дистанции.
- Перестроение других транспортных средств в условиях плотного потока на низкой скорости.
- Пешеходы или велосипедисты, движущиеся по полосе встречного направления.
- Встречный автомобиль, занимающий вашу полосу для обгона.
- Встреча со встречным транспортом на дороге со смещенными пересечениями полос, но без разделительной разметки.
- Пешеходы невысокого роста, сидящие, лежащие или загороженные другими объектами пешеходы.
- Наличие препятствий (дорожные барьеры, тумбы или ограждения) в зонах слияния потоков.
- Разворот встречных автомобилей в разрывах дорожных ограждений.
- Участки поворотов, пешеходных переходов, а также зоны разделения или слияния полос.
- Объезд неподвижного препятствия при быстром приближении встречного автомобиля.
- Невозможность распознавания временных светофоров, светофоров посередине дороги и светофоров нестандартной конструкции.
- Слишком близкое расположение светофоров друг к другу, их загрязнение или слишком высокое размещение, а также наличие индивидуальных светофоров для каждой полосы.
- Полное отключение всех светофоров.
- Движение по дорогам со значительными уклонами, неровным покрытием или резкими изгибами.
- Наличие съездов, слепых поворотов, перекрестков и участков с заторами.
- Наличие на поверхности проезжей части надписей или дорожных знаков.
- Наличие специальной разметки, такой как предупреждающие линии снижения скорости или направляющие линии в зонах разделения потоков.
- Разметка отсутствует, нечеткая или неправильная из-за дорожных работ.
- Наличие у кромки дороги бордюров или других линий с высоким контрастом, таких как стыки дорожного покрытия или трамвайные пути.
- Слишком широкие или слишком узкие полосы разметки с обеих сторон.
- Организация объезда в связи с временными работами.
- Проезд через тоннели, эстакады или портальные рамы, которые влияют на силу сигнала позиционирования.
- Слишком короткая или слишком широкая направляющая разметка на съезде, не распознаваемая системой.
- Присутствие на дороге строительной техники, низкорамных прицепов и других транспортных средств нестандартной формы.
- Движение по узким дорогам, например проселкам, или по дорогам в непосредственной близости от препятствий: деревьев, столбов, фонарей и припаркованных у края проезжей части немоторизованных транспортных средств.
- Наличие на проезжей части низких препятствий, например картонные коробки или небольшие другие объекты.
- Последовательный поворот налево, когда остановившееся впереди транспортное средство блокирует обзор встречной полосы и есть вероятность обгона с левой стороны.
- Въезд на полосу для общественного транспорта в часы ее действия.
- Перестроение между главной и второстепенной дорогой при одновременном появлении встречного автомобиля сзади.
- Проезд под эстакадами или другими многоуровневыми транспортными развязками, где сложная конфигурация перекрестка может привести к ошибке в выборе маршрута.
- Движение в полосе двойного поворота и одновременный поворот с автомобилями из соседней полосы, когда система не может эффективно спрогнозировать траекторию соседних транспортных средств и своевременно избежать столкновения.
- Проезд регулируемых перекрестков, особенно при въезде на пересечение проезжих частей на желтый сигнал светофора, требующий повышенного внимания к другим участникам движения.
Ограничения сенсоров:
- Ухудшена работа камеры, в том числе, помимо прочего:
- Плохая видимость в темное время суток.
- Плохая видимость из-за плохих погодных условий (таких как сильный дождь, сильный снег, густой туман, песчаная буря и так далее).
- Яркий свет, свет сзади, блики от воды, резкие перепады освещенности, например встречный свет фар или прямые солнечные лучи.
- Движение ночью при ослеплении дальним светом фар встречного автомобиля.
- Объектив камеры забрызган, загрязнен, покрыт льдом, снегом и пр.
- Снижение работоспособности камеры в условиях экстремально высоких или низких температур.
- Препятствование обзору камер транспортными средствами, движущимися впереди.
- На способность миллиметрового радара обнаруживать объекты влияют, включая, но не ограничиваясь следующим:
- На радар влияет окружающая среда (такая как помехи электромагнитного поля, подземная парковка, туннель, рельсы, строительная зона, устройство ограничения ширины, устройство ограничения высоты и так далее).
- Радар заблокирован грязью, льдом, снегом и т.д.
- Производительность радара ухудшается из-за экстремальных погодных условий, таких как чрезвычайно жаркая или холодная погода.
- Возможности обнаружения LiDAR могут быть ограничены, включая, но не ограничиваясь следующим:
- Наблюдаются неблагоприятные погодные условия, такие как дождь, снег, туман и песчаная буря.
- Присутствует прямой яркий свет, контровое освещение или отражение от воды.
- Присутствуют выхлопные газы, брызги, снег или пыль от впереди идущих транспортных средств.
- Экстремально высокие или низкие температуры.
- Окно приемопередатчика LiDAR заблокировано дождем, грязью, льдом, инеем, снегом, пленкой на автомобиле и т.д.
- Окно приемопередатчика LiDAR повреждено внешним воздействием, имеются царапины или трещины.
- Условно-автономное вождение по городу – функция ассистента вождения, не позволяющая учесть все возможные условия движения, погодные условия и обстановку на дороге. Водителю необходимо постоянно следить за автомобилями вокруг, соблюдением безопасной дистанции, скоростного режима, своевременностью торможения, удерживая руки на рулевом колесе и сохраняя готовность взять управление на себя в любой момент.
- Условно-автономное вождение по городу не предназначен для реагирования в непредвиденных ситуациях, и водитель отвечает за своевременный перехват управления, безопасность езды и несет всю ответственность за управление автомобилем.
- Не следует ожидать от функции условно-автономного вождения по городу способности правильно среагировать на экстренные ситуации. Постоянно следите за дорогой впереди и будьте готовы в любой момент принять необходимые меры. Несоблюдение данного требования может привести к получению серьезной травмы или смерти.
- При отклонении автомобиля от проложенного маршрута водителю необходимо немедленно перехватить управление.
- Функция условно-автономного вождения по городу может пересечь сплошную линию при возникновении экстремальной ситуации на дороге. Постоянно сохраняйте бдительность, полный контроль над автомобилем и будьте готовы при необходимости вмешаться в управление.
- При проезде через несколько сложных перекрестков подряд будьте чрезвычайно внимательны. Функция условно-автономного вождения по городу может выехать на неправильный маршрут или неожиданно затормозить. При нежелании ехать по выбранному системой маршруту водителю следует немедленно взять управление на себя.
- Не используйте функцию условно-автономного вождения по городу на резких поворотах, большом уклоне, обледеневшей и скользкой дороге, а также во время дождя, снега или тумана.
- При отсутствии линии полосы, наличии нескольких линий полос, стертых или нечетких или перекрытых линий полос система может начать помогать в рулении без указания водителя. Водителю необходимо своевременно принять управление на себя.
- Система не может во всех случаях распознавать препятствия (дорожные конусы, ограждения, дорожные знаки и пластиковые заграждения). Если впереди появляется участок временных строительных работ, водителю следует взять управление автомобилем на себя и двигаться с осторожностью.
- Система может не среагировать на неподвижный объект впереди, быстрый въезд автомобиля на вашу полосу или въезд на вашу полосу автомобиля на высокой относительной скорости. Соответственно, она может не нажать тормоз для снижения скорости.